
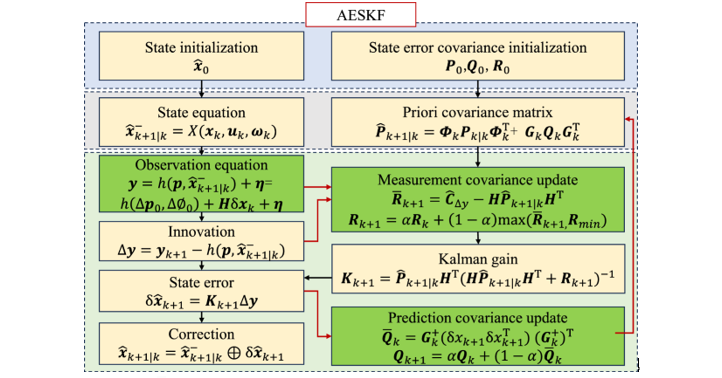

Implementation flowchart of the proposed Adaptive Error State Kalman Filter (AESKF).
FAYETTEVILLE, GA, UNITED STATES, June 23, 2026 /EINPresswire.com/ — Imagine navigating a sprawling subway system or a darkish tunnel the place World Navigation Satellite tv for pc System (GNSS) indicators can’t attain. For many years, this has been a technological blind spot. Researchers have now developed a novel navigation technique that reads a constructing’s distinctive magnetic “fingerprint” to find out its location with unprecedented accuracy.
Typical indoor positioning usually relies on costly Wi-Fi or Bluetooth infrastructure, or on inertial sensors that accumulate drift inside seconds. Magnetic navigation has emerged as a promising different as a result of metal constructions and electronics depart buildings with distinctive, location-specific magnetic signatures. Nevertheless, present map-free strategies depend on polynomial fashions that oversimplify the magnetic subject’s spatial variations. They seize the broad pattern however miss the sharp, native anomalies brought on by metallic pipes or distribution containers. As a consequence of these limitations, a extra correct, sturdy, and bodily interpretable strategy to magnetic subject modeling is urgently wanted for sensible indoor navigation.
A staff from the Aerospace Info Analysis Institute, Chinese language Academy of Sciences, publishing (DOI: 10.1186/s43020-026-00201-3) within the journal Satellite Navigation on June 5, 2026, has unveiled a sturdy magnetic-inertial odometry (MIO) technique based mostly on the Fibonacci sphere-sampled equal magnetic dipole mannequin (FSS-EMD), denoted as FSS-EMD-MIO. The system makes use of an array of 30 small magnetometers and an inertial measurement unit to trace motion with none exterior indicators.
The core innovation lies in how the system fashions the indoor magnetic atmosphere. As a substitute of drawing clean curves by means of the information, it represents the native subject as a mixture of digital “equal magnetic dipoles” – with 16 dipoles recognized as optimum by means of systematic parameter evaluation. Their positions are decided by the Fibonacci sphere sampling approach, which evenly distributes factors in 3D house with none directional bias, stopping overfitting. Every dipole’s magnetic second is then solved in actual time utilizing least squares becoming. The staff additionally derived the spatial gradient of this mannequin, making a direct mathematical hyperlink between altering magnetic readings and the service’s displacement, velocity, and angle. To deal with the inherent nonlinearity and location-dependent noise, an Adaptive Error State Kalman Filter (AESKF) fuses inertial information with magnetic observations. Examined on a public dataset, the tactic achieved a horizontal positioning root imply sq. error (RMSE) under 1.27 meters, outperforming the earlier cutting-edge (MAINS) by 46% on common.
“The outdated polynomial strategies take a look at the magnetic subject from far-off—they see the hills however not the potholes. Our mannequin locations digital sources precisely the place the magnetic perturbations reside,” the authors defined. “The Fibonacci sphere sampling ensures that no route is favored, so whether or not you tilt the sensor or stroll in circles, the system adapts reliably. We primarily gave the constructing’s chaotic magnetic subject a readable 3D construction. This implies first responders or warehouse robots can lastly have a ‘magnetic compass’ that works even when the lights are off and World Navigation Satellite tv for pc System (GNSS) is out.”
This analysis paves the way in which for actually infrastructure-free indoor navigation. Potential functions embrace guiding firefighters by means of smoke-filled buildings, monitoring stock robots in steel-racked warehouses, and offering positioning for autonomous automobiles in parking garages or mines. The authors be aware that future work will incorporate loop-closure detection to appropriate long-term drift, akin to how an individual acknowledges a well-known intersection. By growing scan-matching algorithms based mostly on overlapping magnetic subject areas, the staff goals to construct a whole magnetic simultaneous localization and mapping (SLAM) system for multi-floor buildings, additional closing the hole between outside and indoor navigation reliability.
References
DOI
10.1186/s43020-026-00201-3
Authentic Supply URL
https://doi.org/10.1186/s43020-026-00201-3
Funding Info
This work was supported by Agriculture Biobreeding Main Mission (2023ZD0405503) and Elementary Analysis Funds for the Central Universities (SWU-XDJH202311 and SWU-KQ22061).
Lucy Wang
BioDesign Analysis
e-mail us right here
Authorized Disclaimer:
EIN Presswire supplies this information content material “as is” with out guarantee of any sort. We don’t settle for any accountability or legal responsibility
for the accuracy, content material, pictures, movies, licenses, completeness, legality, or reliability of the data contained on this
article. When you’ve got any complaints or copyright points associated to this text, kindly contact the writer above.
